د روبوټیک میګ ویلډینګ ---- د سړک څراغ قطب ویلډینګ حل
شاخص
1. د کاري برخې معلومات
2. د روبوټیک ویلډینګ حل عمومي کتنه
3. د روبوټیک ویلډینګ حل پروسه
4. د روبوټیک حل تجهیزاتو ترتیب
5. اصلي دنده 6. د تجهیزاتو پیژندنه
7. نصب کول، کمیشن کول او روزنه
8. چک او منل
9. د چاپیریال اړتیاوې
10. تضمین او د پلور وروسته خدمت
11. تحویلي ضمیمه اسناد
د روبوټیک ویلډینګ غوښتنلیک ویډیو
1، Workpiece معلومات
-د ویلډینګ تار قطر: Ф1.2mm
-د ویلډینګ پروسه: د ګاز پوښل ویلډینګ/میګ ویلډینګ
-د ویلډ سیوم ډول: د مستقیم کرښې ډول، د حلقې ډول
-د ګازو ساتنه:99٪ CO2
-د عملیاتو طریقه: په لاسي ډول بارول او پورته کول، د روبوټ اتومات ویلډینګ
-د تنظیم کولو تېروتنه:≤ 0.5mm
-د پلیټ پاکول :فلزي چمک په ویلډ کې لیدل کیدی شي اوپه دواړو خواوو کې د ویلډ سیم دوه ځله لوړوالی په حد کې
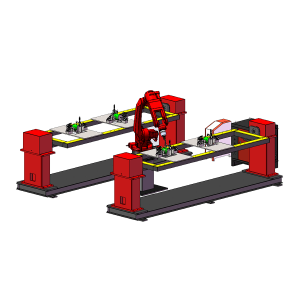
2، د روبوټیک ویلډینګ حل کتنه
د کاري موثریت ښه کولو لپاره ، د ورک پیس ریښتیني وضعیت سره سم ، د هوین فابریکه به د ویلډینګ روبوټ ورک سټیشن سیټ چمتو کړي ، کوم چې د مختلف محصولاتو سره مطابقت کولو لپاره د مختلف وسیلو سره ځای په ځای کیدی شي.د کار سټیشن د روبوټ ماډل څخه جوړ شوی دی: HY1006A-145 ویلډینګ روبوټ، د ویلډینګ بریښنا سرچینه، د روبوټ لپاره ځانګړي ویلډینګ مشعل، د بریښنایی کنټرول کابینې او بټونو، د اوبو کولنګ چیلر، د ډبل کاري سټیشن پوزیسرونه، د تجهیزاتو فکسچر، د خوندیتوب محافظت کټ (اختیاري) او نور برخې
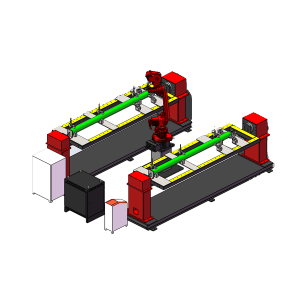
3، د میګ ویلډینګ روبوټیک ورک سټیشن ترتیب پیژندنه
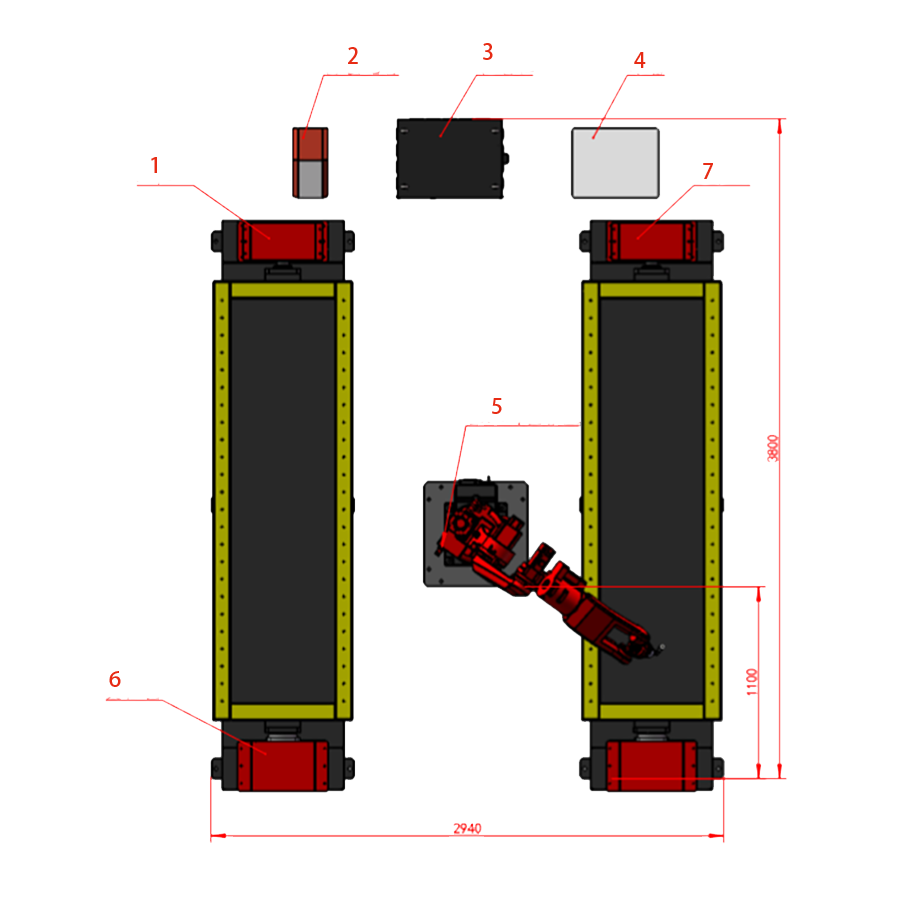
د هونین روبوټ آرک ویلډینګ ورک سټیشن ترتیب
1، کاري سټیشن 1
2، د ویلډینګ بریښنا سرچینه
3، د روبوټ کنټرولر
4، د اوبو یخولو چلر
5، Honyen آرک ویلډینګ روبوټ، HY1006A-145
6، موقعیت لرونکی
7، کاري سټیشن 2
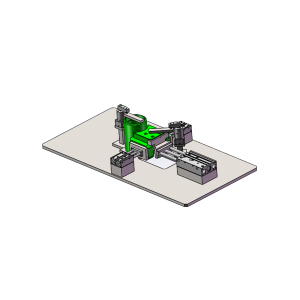
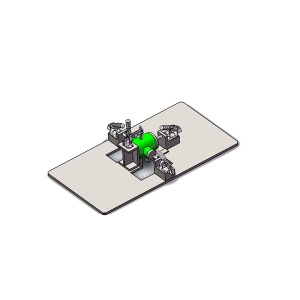
د برقی قطب برخو فکسچر
د برقی قطب برخو فکسچر 2
د روبوټیک ویلډینګ حلونو ترتیب 1
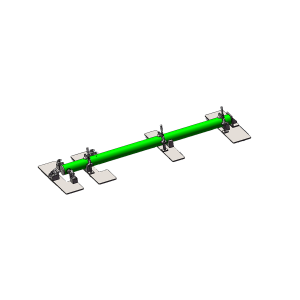
د برقی قطب پرزو فکسچر 3
د روبوټیک ویلډینګ حلونو ترتیب 2
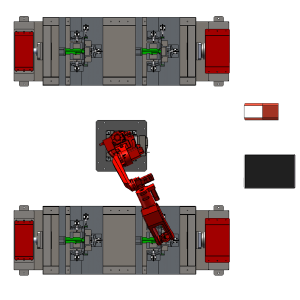
د روبوټیک ویلډینګ حلونو ترتیب 3
4. د روبوټیک ویلډینګ حل پروسه I. آپریټر په 1 سټیشن کې د ورک پیس بار کوي، د بارولو او بندولو وروسته.آپریټر د روبوټ ریزرویشن پیل 1 تڼۍ فشاروي، او روبوټ اتومات ویلډینګ پیل کوي؛
II.آپریټر د ورک پیس بار کولو لپاره سټیشن 2 ته ځي.د ورک پیس بار کولو وروسته ، آپریټر د روبوټ ریزرویشن سټارټ بټن 2 فشاروي او د روبوټ بشپړ ویلډینګ ته انتظار کوي؛
III.وروسته له دې چې روبوټ په 1 سټیشن کې ویلډینګ پای ته ورسوي، دا په اتوماتيک ډول د سټیشن 2 پروګرام ترسره کوي؛
Ⅳبیا آپریټر په 1 سټیشن کې ورک پیس پورته کوي او نوی ورک پیس باروي؛
V. دوره په ترتیب سره.
5. د روبوټیک حل تجهیزاتو ترتیب
| توکي | ماډل | مقدار | برانډ | څرګندونې | ||
| 1 | ۱.۱ | د روبوټ بدن | HY1006A-145 | 1 سیټ | هینین | د روبوټ بدن، د کنټرول کابینې، د تدریس پروګرامر په شمول |
| 1.2 | د روبوټ کنټرول کابینه | 1 سیټ | ||||
| 1.3 | د ویلډینګ بریښنا سرچینه | 1 سیټ | هینین | میګمیټ ویلډر | ||
| 1.4 | د اوبو ټانک | 1 سیټ | هینین | |||
| 1.5 | د اوبو یخولو ویلډینګ مشعل | 1 سیټ | هینین | |||
| 2 | 1 د محور موقعیت لرونکی | HY4030 | 2 سیټ | هینین | 2.5m، 300kg بار، 1.5KW درجه شوي تولید بریښنا | |
| 3 | د بریښنایی کنټرول سټیشن | 2 سیټ | هینین | |||
| 4 | د سیسټم ډیزاین، ادغام او برنامه کول | 1 سیټ | هینین | |||
| 5 | د خوندیتوب دیوال | 1 سیټ | هینین | اختیاري | ||
6. اصلي دنده د ویلډینګ کیفیت او موثریت ډاډ ترلاسه کولو لپاره ، روبوټیک سیسټم د بشپړ ځان محافظت فعالیت او آرک ویلډینګ ډیټابیس سره مجهز دی.اصلي دندې په لاندې ډول دي:
اصلي لاره بیا پیل کړئ: کله چې د شیلډ ګاز جریان غیر معمولي وي ، د ویلډینګ تار مصرف او په موقتي ډول د ویلډینګ په جریان کې ودرول شي ، د "ویډینګ دوام" قومانده مستقیم د ستونزو حل کولو وروسته ویل کیدی شي ، او روبوټ کولی شي په اوتومات ډول له هر حالت څخه تعلیق شوي موقعیت ته ویلډینګ ته دوام ورکړي.
د خطا کشف او وړاندوینه: وروسته له دې چې د الارم پیښ شي، روبوټ د کنټرول وسیلې څخه ډاټا ترلاسه کوي، د نیمګړتیاو برخو اټکل کوي، او په بدل کې د لویو غلطیو برخو لیست ورکوي، په کمپیوټر کې د اجزاوو د ځای پر ځای کولو او تشخیص ترتیب ښکاره کوي، کوم چې په سایټ کې د تدریس لندبل سره لیدل کیدی شي.برسېره پردې، کمپیوټر په منظمه توګه د روبوټ څخه د عملیاتو ډاټا ترلاسه کوي، ترلاسه شوي ډاټا تحلیلوي، قضاوت کوي چې آیا د روبوټ عملیاتي حالت نورمال دی، او کاروونکي ګړندي کوي چې د راتلونکو غلطیو سره معامله وکړي.
د ټکر ضد فعالیت: کله چې د روبوټ ویلډینګ مشعل د بهرنی شیانو سره ټکر کوي، د روبوټ د ټکر ضد وسیله د ویلډینګ مشعل او د روبوټ بدن د ساتنې لپاره کار کوي.
د متخصص ډیټابیس: په برنامه کې د اړین ویلډینګ شرایطو تنظیم کولو سره ، دا سیسټم کولی شي په اوتومات ډول د ویلډ سیم تنظیم او د ورته ویلډینګ پیرامیټونو تنظیم کول بشپړ کړي.
ښوونه او پروګرامونه: د درسي لانجې له لارې په سایټ کې پروګرامونه احساس کړئ.
اوبدل ویلډینګ: د ویلډینګ پروسې په جریان کې ، روبوټ نشي کولی یوازې د عام سوینګ ویلډینګ ګردي ډول او همدارنګه Z ډول احساس کړي.دا د روبوټ سره مرسته کوي چې د پیرودونکي د سوینګ ویلډینګ فعالیت د کاري ټوټې شکل سره سم احساس کړي ، ترڅو د ویلډینګ ځواک او ښه ویلډینګ فعالیت سره د ویلډ سیم عرض زیات کړي.
د وضعیت ښودنه: روبوټ کولی شي د ټول روبوټ سیسټم عملیاتي حالت د ښوونې لینډ له لارې ښکاره کړي، پشمول د پروګرام عملیات حالت، د ویلډینګ پروسې پیرامیټر بدلونونه، د سیسټم پیرامیټر بدلونونه، د روبوټ اوسنی موقعیت، د اجرا کولو تاریخ ریکارډونه، د خوندیتوب سیګنالونه، د الارم ریکارډونه، او داسې نور، ترڅو پیرودونکي وکولی شي. په وخت سره د روبوټ سیسټم وضعیت درک کړئ او مخکې له مخکې د ستونزو مخه ونیسئ.
د ننوتلو / آوټ پټ فایلونه: په روبوټ سیسټم کې د روبوټ سیسټم فایلونه او د برنامې فایلونه د روبوټ کنټرولر دننه په SD کارت کې زیرمه کیدی شي ، او بهرني تجهیزاتو ته هم خوندي کیدی شي.د آفلاین پروګرامینګ سافټویر لخوا لیکل شوي پروګرامونه د روبوټ کنټرولر کې هم پورته کیدی شي، دا د پیرودونکو سره په منظم ډول د سیسټم فایلونو بیک اپ کولو کې مرسته کوي، کله چې د روبوټ سیسټم کې ستونزه وي، نو دا بیک اپ د روبوټ ستونزې حل کولو لپاره بحال کیدی شي.
7، د تجهیزاتو پیژندنه HY1006A-145 یو لوړ فعالیت روبوټ دی چې هوښیار فعالیت لري.دا د ګاز شیلډ ویلډینګ او پرې کولو غوښتنلیکونو لپاره مناسب دی.د دې ځانګړتیاوې لږ وزن او کمپیکٹ جوړښت دی.
د آرک ویلډینګ غوښتنلیکونو لپاره ، هوین په بریالیتوب سره یو سپک وزن او کمپیکٹ بازو ډیزاین کړی ، کوم چې نه یوازې اصلي اعتبار تضمینوي ، او د عالي لګښت فعالیت هم احساسوي.
هوین خورا پرمختللی سرو ټیکنالوژي غوره کوي ، کوم چې کولی شي د حرکت سرعت او د روبوټ دقت ښه کړي ، د آپریټر مداخله کمه کړي ، او د ګاز شیلډ ویلډینګ او پرې کولو لپاره کاري موثریت ښه کړي.
| محور | پېلوډ | د تکرار وړتیا | د بریښنا ظرفیت | چاپیریال | وزن | نصب کول |
| 6 | 10 | 0.08 | 6.5KVA | 0~45℃20~80%RH(نه رطوبت) | 300kg | ځمکه / چت |
| د حرکت رینج J1 | J2 | J3 | J4 | J5 | J6 | د IP کچه |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54/IP65 (ملی) |
| اعظمي سرعت J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/s | 145°/s | 140°/s | 217°/s | 172°/s | 500°/s |
د چینایي عملیاتو بشپړ انٹرفیس او د بشپړ کیبورډ عملیاتو سره انګلیسي ته بدل کیدی شي
د مختلف مخابراتو ملاتړ کوي پشمول د I / O انٹرفیس ، موډبس ، ایترنیټ وغيره.
د ډیری روبوټونو او نورو بهرنیو تجهیزاتو سره د اړیکو ملاتړ کول
لوی اندازه رنګین ټچ سکرین
د ټکر ضد وسیله تنظیم شوې، د روبوټ بازو ساتنه او مداخله کموي
د روبوټ حرکت کنټرول د غوره لارې پلان چمتو کوي
په سلګونو جوړ شوي فنکشن بکسونه او افعال پروګرامونه ساده کوي
د SD کارت له لارې ، دا د ډیټا بیک اپ او کاپي کولو لپاره اسانه دی
موقعیت لرونکی

د هونین هیډ - ټیل ډبل سپورټ پوزیشنر چې د ورک پیس څرخولو لپاره کارول کیږي ، د روبوټ سره همکاري کوي ، د ویلډینګ لپاره ښه موقعیت ته رسي او د ویلډینګ ښه فعالیت ترلاسه کوي
د ویلډینګ بریښنا سرچینه

Megmeet Ehave cm 500h / 500 / 350 لړۍ بشپړ ډیجیټل صنعتي درانه بار * CO2 / MAG / MMA هوښیار ویلډینګ ماشین
8. نصب کول، کمیشن کول او روزنه
د تحویلۍ دمخه ، د روبوټ سیسټم به راټول شي او زموږ په شرکت کې به په بشپړ ډول فعال ازمول شي.پیرودونکي به خپلې برخې زموږ شرکت ته د تحویلۍ دمخه د آزموینې ویلډینګ او دمخه منلو لپاره تحویل کړي.د مخکې منلو په جریان کې، د پیرودونکي چلونکي به ابتدايي تخنیکي روزنه ترلاسه کړي.
د نصب کولو پلان او تخنیکي اړتیاوې به د نصب کولو څخه 15 ورځې دمخه پیرودونکي ته وسپارل شي، او پیرودونکي باید د اړتیاو سره سم وخت چمتو کړي.زموږ شرکت به انجینران واستوي ترڅو د کارونکي سایټ کې د سیسټم نصب او کمیشن کولو ترسره کړي.په دې شرط چې پیرودونکي د کافي کمېشن ورک پیس ډاډمن کړي، د پروګرام کولو کمېشن کولو وخت، د پرسونل روزنې د ډله ایزې آزموینې تولید ته باید د 10 ورځو څخه زیات نه وي.زموږ شرکت کاروونکو ته د پیرودونکو لپاره د روبوټ سیسټم پروګرام کولو، عملیات او ساتنې روزنه ورکوي، او زده کونکي باید د کمپیوټر اساسي پوهه ولري.
د نصبولو او کمولو په جریان کې، پیرودونکي باید اړین وسایل چمتو کړي، لکه د پورته کولو تجهیزات، فورک لیفټ، کیبلونه، د اغیزو ډرل، او نور، او د پورته کولو او نصب کولو په وخت کې لنډمهاله مرسته چمتو کړي.
زموږ شرکت د لارښود ، نصب کولو ، تجهیزاتو کمیسیون کولو او آپریټر روزنې مسؤلیت لري.زموږ شرکت د ساتنې او عملیاتو روزنې مسؤل دی.آپریټر به پخپله تجهیزات چلوي او ساتي.د روزنې مینځپانګې: د تجهیزاتو جوړښت اصول ، د بریښنایی ستونزې حل کول ، د برنامو لومړني لارښودونو پیژندنه ، د برنامې مهارتونه او د ځانګړي برخو برنامې میتودونه ، د تجهیزاتو عملیاتي پینل پیژندنه او احتیاطي توکي ، د تجهیزاتو عملیات تمرین ، او داسې نور.
9. چک او منل
دمخه منل زموږ په شرکت کې د دواړو خواوو د اړوندو کارمندانو په ګډون ترسره کیږي.د مخکې منلو په جریان کې، د کار پیسونه باید د پیرودونکي لخوا چمتو شوي د ورک پیس دقت سره سم معاینه شي، یوازې وړ کاري پیس باید ویلډیډ شي، او د منلو دمخه ازموینې راپور باید خپور شي.د بشپړ منلو وروسته، روبوټ باید وسپارل شي.د دمخه منلو ډاډ ترلاسه کولو لپاره ، د نورمال تولید لپاره به 3 ورک پیس چمتو شي.
10.د چاپیریال اړتیاوې د خوندیتوب اړتیاوې: ګاز او اضافي پرزې چې د کاروونکو لخوا کارول کیږي باید د اړوندو ملي معیارونو سره مطابقت ولري.
د هوا سرچینه باید په بهر کې ځای په ځای شي، له اور څخه لږ تر لږه 15m لرې، او د ګاز او اکسیجن څخه لږ تر لږه 15m لیرې نه وي.د هوا سرچینه باید د هوا ښه والی شرایط وساتي او د باد څخه لیرې په یخ ځای کې وي.
د روبوټ کارولو دمخه د ګاز ټول سرکټونه باید معاینه شي.که چیرې د هوا لیک شتون ولري، دا باید ترمیم شي ترڅو ډاډ ترلاسه شي چې هیڅ غلطی شتون نلري.
کله چې فشار تنظیم کړئ او د ګاز سلنډر بدل کړئ، آپریټر باید په لاسونو کې د تیلو مواد ونه لري.
محیطي رطوبت: په عموم کې، د محیطي رطوبت 20% ~ 75% RH دی (په هغه صورت کې چې د کنډیشن نه وي)؛لنډمهاله (د یوې میاشتې په اوږدو کې) له 95% RH څخه کم (د کنډیشن پرته پیښې).
کمپریس شوی هوا: 4.5 ~ 6.0 kgf / cm2 (0.45-0.6mpa)، فلټر تیل او اوبه، ≥ 100L / min
بنسټ: د کانکریټ لږ تر لږه قوت C25 دی، او د بنسټ لږ تر لږه ضخامت 400 ملي متره دی
کمپن: د کمپن سرچینې څخه لرې وساتئ
د بریښنا رسول: د ټولو تولید شوي بریښنایی او بریښنایی تجهیزاتو بریښنا رسول د 50Hz (± 1) او 380V (± 10٪) درې مرحلې AC ولټاژ غوره کوي ترڅو د بریښنا رسولو لومړني ځمکنۍ ډاډ ترلاسه کړي.
په سایټ کې د پیرودونکو لخوا چمتو شوي خدمتونه:
د سپارلو دمخه ټول اړین چمتووالی، لکه بنسټ، اړین ویلډینګ کار، د مرستندویه وسایلو فکس کول، او نور.
د پیرودونکي سایټ کې کښته کول او ترانسپورت.
11. تضمین او د پلور وروسته خدمت د ویلډ بریښنا سرچینې تضمین موده 12 میاشتې ده.
د روبوټ بدن د تضمین موده 18 میاشتې ده.
د ناکامۍ یا زیان په صورت کې چې د عادي کارونې لاندې وي او تجهیزات د تضمین په موده کې وي، زموږ شرکت کولی شي وړیا پرزې ترمیم یا بدل کړي EXW (د مصرفي توکو، ساتنې محصولاتو، خوندیتوب ټیوبونو، شاخص څراغونو او نورو مصرفي توکو پرته چې زموږ د شرکت لخوا ډیزاین شوي).
د تضمین پرته د زیان منونکو برخو لپاره، زموږ شرکت د نورمال خدمت ژوند او د زیان منونکو برخو عرضه کولو نرخ ژمنه کوي، او تجهیزات تر پنځو کلونو پورې د تجهیزاتو مستحکم اکمالاتي چینل لري.
د تضمین دورې څخه بهر، زموږ شرکت به د ټول عمر تادیه شوي خدمت چمتو کولو ته دوام ورکړي او جامع تخنیکي مالتړ او د اړتیا وړ تجهیزاتو لوازم چمتو کړي.
12. تحویلي ضمیمه اسناد د نصبولو نقاشي: د تجهیزاتو بنسټ ساختماني نقاشي او د تجهیزاتو نصبولو نقاشي
◆ ډيزاين رسمونه: د فکسچر او وسايلو نقاشي
◆ لارښود: د تجهیزاتو عملیات لارښود، د ساتنې لارښود او د روبوټ عملیات لارښود
◆ لوازم: د سپارلو لیست، سند او تضمین کارت.



