د پروګرام عمومي کتنه
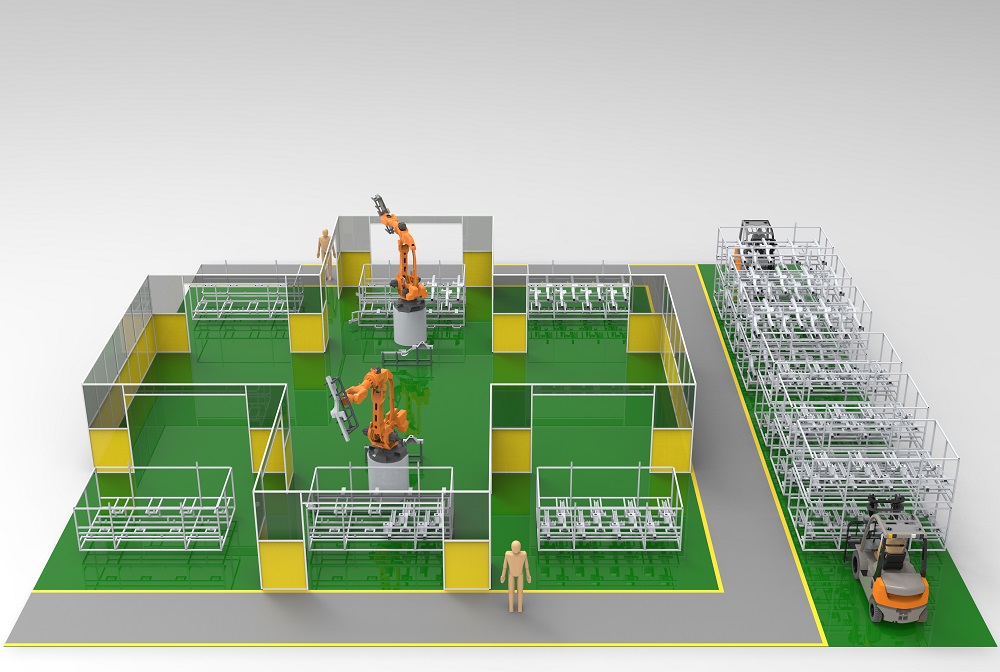
د تولید لاین اصلي دنده: د موټر مخکینۍ ریل ټکر وړتیا او د څرخ پوښ اسمبلۍ تولید لاین.
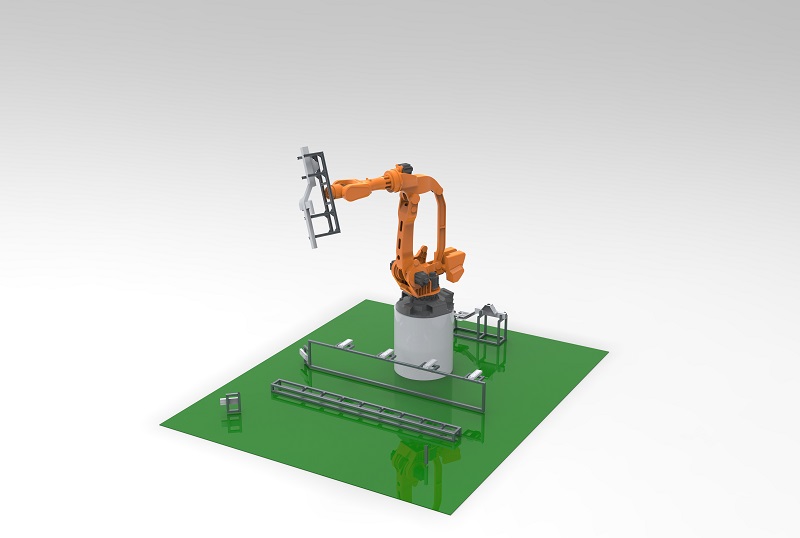
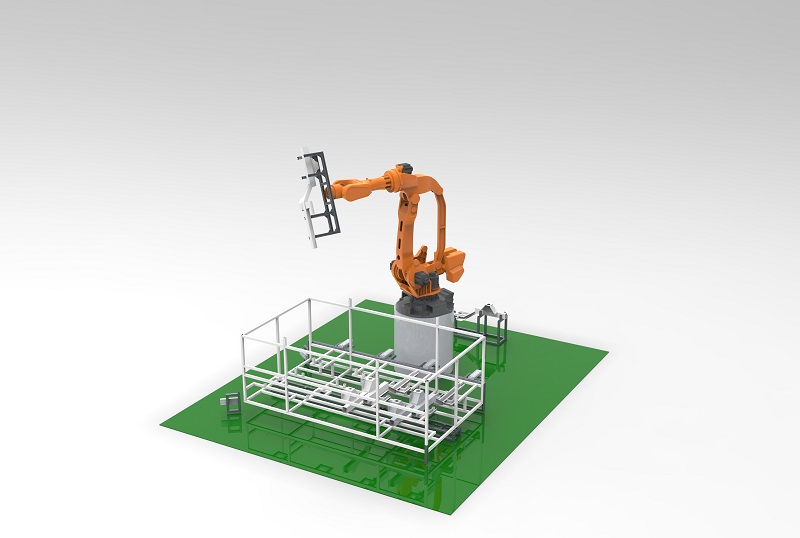
د اسمبلۍ پروسه: د موټر پرزې ځای ته راوړئ او ازموینه وکړئ——روبوټ پرزه ځای په ځای کړئ——HY1165A-290 پرزې واخلئ او په پرزو موټر کې یې واچوئ——کله چې د پارکینګ ځای ډک شي، کارمندانو ته وهڅوئ چې پرزې بدلې کړي.
دا پروژه د HY1165A-290 دوه سیټونه، د پارکینګ دوه سیټونه، د گرفتونو دوه سیټونه او نور بنسټونه لري.
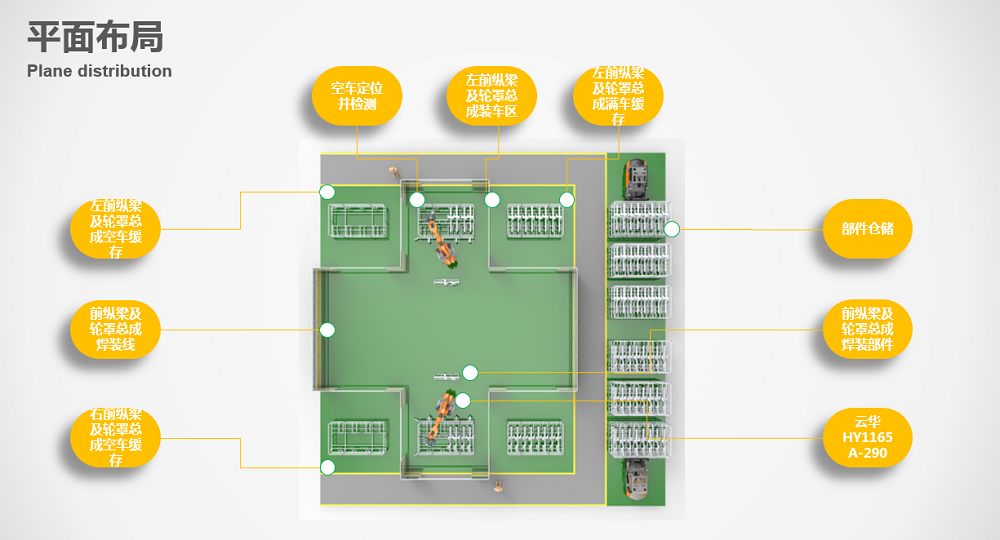
د کارځای امنیت ساتنه، د اجزاو ځای پرځای کولو موثریت کشف، د گرفت موثریت کشف، د خالي پارکینګ ځای کشف.
د اجزاو موټر موقعیت او کشف، د اجزاو موټر دوهم پوړ د موادو ریک کنټرول، خالي او بشپړ موټر کنټرول.



