صنعتي تولید د اقتصادي او ټولنیز پرمختګ د هڅولو لپاره یوه مهمه اړیکه ده. اوس مهال، د اتوماتیک ویلډینګ تجهیزاتو په اړه څیړنه ژوره او کانکریټ کیږي، کوم چې دا د مختلفو ډولونو ویلډینګ جوړښتونو په تولید کې په پراخه کچه کارول کیږي.
د اتوماتیک ویلډینګ په پروسه کې، د ویلډینګ اسمبلۍ تشې غلطۍ هوښیار او ډیجیټل معقول کنټرول تر یوې اندازې پورې، پدې اساس، د ورک پیس موقعیت توپیر، د ورک پیس ګډ انحراف او نورو فکتورونو ته هم باید پام وشي. له همدې امله، د لیزر ویلډینګ سیم تعقیب ټیکنالوژي د ویلډینګ پروسې کې مهم رول لوبوي.
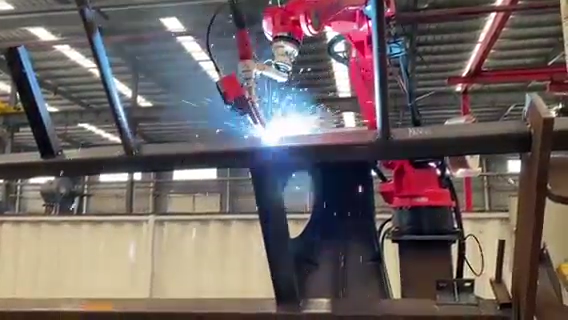
د سمنټو ټانک موټر د موټر اساس ویلډینګ اووه محورونه د ځمکې مدار اته محورونه د لیزر ویلډینګ سره گردش
- د کاري ټوټې موقعیت خورا توپیر لري
- د ورک پیس په اتصال کې انحراف شتون لري
- د ویلډینګ لوړ دقت ته اړتیا ده
- د ویلډینګ لپاره خراب چاپیریال او لوګی
په دې حالت کې، د یو هارټ هوښیار روبوټ HY1006A-145 د لیزر ویلډینګ سیم تعقیب سیسټم سره د ویلډینګ لپاره کارول کیږي، کوم چې لوړ انعطاف، ثبات او اعتبار لري.
د هر ویلډینګ څخه مخکې، تجهیزات لومړی د ویلډینګ سیم د موقعیت له لارې د ویلډینګ سیم همغږي سکین او ثبتوي، او بیا د داخلي الګوریتم لخوا د همغږۍ آفسیټ محاسبه کوي او د حوالې همغږي پیرامیټرې په ریښتیني وخت کې اچوي ترڅو په وخت کې اصلي انحراف سم کړي، ترڅو د ویلډینګ وروسته د محصول سیل کول او بشپړتیا ډاډمن شي.
د "څلور نقطې تقاطع" طریقه
لکه څنګه چې ټولو ته معلومه ده، دوه ټکي یوه مستقیمه کرښه ټاکي، مګر د کاري ټوټې اسمبلۍ به زاویه جوړه کړي، دودیز الګوریتم نشي کولی خپل موقعیت وټاکي، دا د څلورو بجو په وخت کې د "قاطع" میتود کارولو ته اړتیا لري، دوه کرښې سره یو ځای کیږي چې د تقاطع نقطه تولیدوي، د ځانګړي الګوریتم د پیژندل شوي څلورو نقطو همغږي ټاکلو له لارې د تقاطع نقطې همغږي موقعیت محاسبه کوي، ترڅو د ویلډینګ هدف ترلاسه شي.

د لیزر سیم تعقیب سیسټم
د لیزر ویلډینګ سیم تعقیب سیسټم په عمده توګه د لیزر سینسرونو او څارنې ټرمینلونو څخه جوړ شوی دی. د لیزر سینسر د ویلډینګ سیم معلوماتو د فعال استملاک او ریښتیني وخت پروسس کولو لپاره کارول کیږي، او د صنعتي روبوټونو سره ریښتیني وخت اړیکه ساتي. د څارنې ټرمینل سینسرونه څاري او تنظیموي. سیسټم د هوښیار ویلډینګ اړتیاو پوره کولو لپاره د ویلډینګ دمخه د موقعیت، تعقیب او سکین کولو دندې هم لري.
د کار اصل: د ویلډ سیم سکین کول، د پوائنټ کلاوډ عکس فټ کول، الګوریتم په سمه توګه د ځانګړتیا ټکي پیژني، او د محاسبې پایلو ریښتیني وخت ډیټا چې روبوټ ته لیږل کیږي، د کنټرول لارښوونو ته، د روبوټ عملیات تعدیل یا لارښود کوي.
د نالیه شوي پلیټ محلول

د ګرد سوري اتوماتیک پلګ ویلډینګ حل

د ګردي ګنډلو حل

د ټیوب پلیټ حلونه
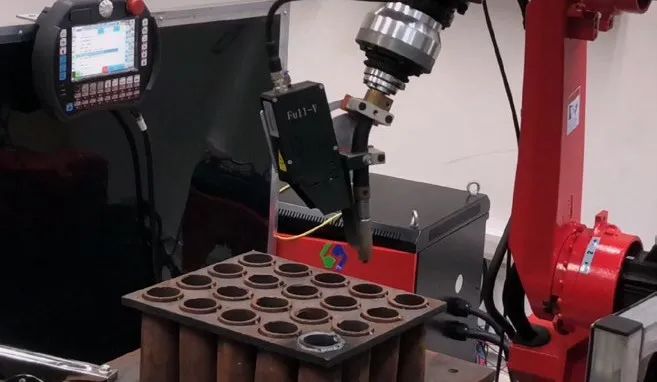
یونها انټیلیجنټ کولی شي د ګړندي ځای پرځای کولو، خوندي او موثر اتوماتیک حلونو او ریښتیني وخت سیسټم حلونه چمتو کړي. د لیزر ویژن ویلډینګ سیم تعقیب سیسټم د ویلډینګ روبوټ ته وړتیا ورکوي چې د ریښتیني وخت ویلډینګ سیم موقعیت او تعقیب احساس کړي، او د ویلډینګ پروسې کې د ویلډینګ سیم آفسیټ سره سم د ویلډینګ لاره سمه کړي، ترڅو ریښتیني هوښیار ویلډینګ احساس کړي.
د پوسټ وخت: اپریل-۰۹-۲۰۲۲



