د روبوټ ویلډینګ د ویلډینګ اغیز د ډیری اړخونو لخوا اغیزمن کیږي. ډیری پیرودونکي به د ویلډینګ روبوټونو په کارولو کې د مهارت ترلاسه کولو دمخه لږ یا ډیر ځینې ستونزې سره مخ شي. په اصل کې، دا ستونزې د ناسم عملیاتو یا د روبوټ ناسم ترتیباتو له امله رامینځته کیږي، او دوی د مناسبو سمونونو سره حل کیدی شي. بیا، مدیر به تاسو ته د ځینو ستونزو په اړه معلومات درکړي چې ډیری وختونه د یونهوا ویلډینګ روبوټونو او اړوندو حلونو په کارولو کې پیښیږي.
۱. د ویلډینګ په جریان کې د قوس ناکامه پیل
۱. قوس لا نه دی پیل شوی
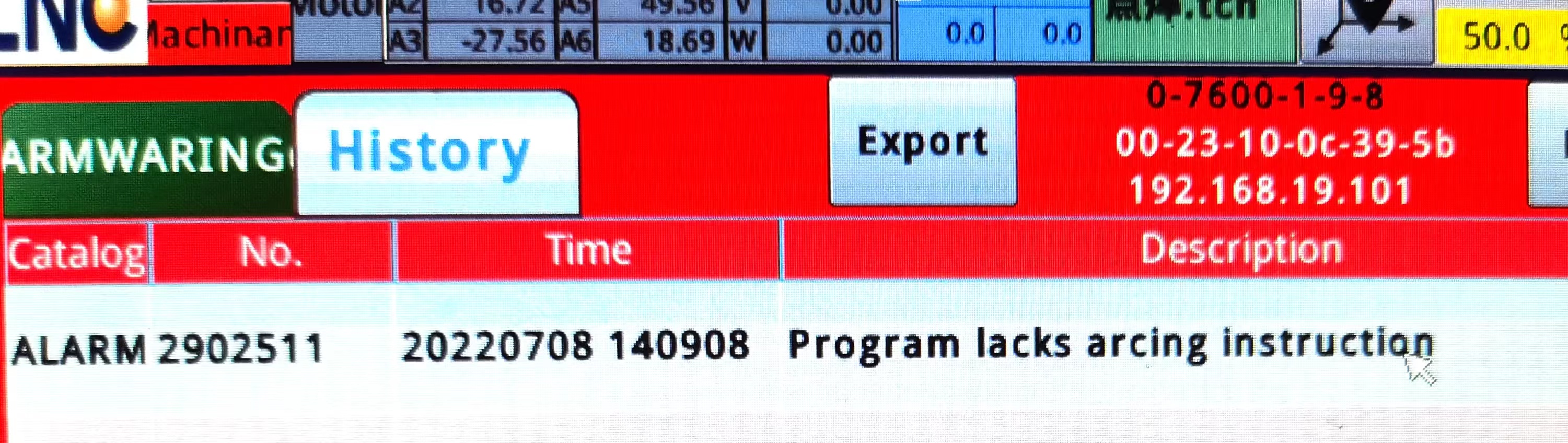
دلیل: په ترمیم شوي پروګرام کې د آرک پای قوماندې اجرا کولو دمخه د آرک پیل کولو اړوند کوم قومانده شتون نلري.
د پروسس کولو طریقه: وګورئ چې ایا د قوس پای ته رسیدو لپاره یو بل قومانده اضافه کړئ یا د قوس پیل کولو لپاره یو لږ قومانده
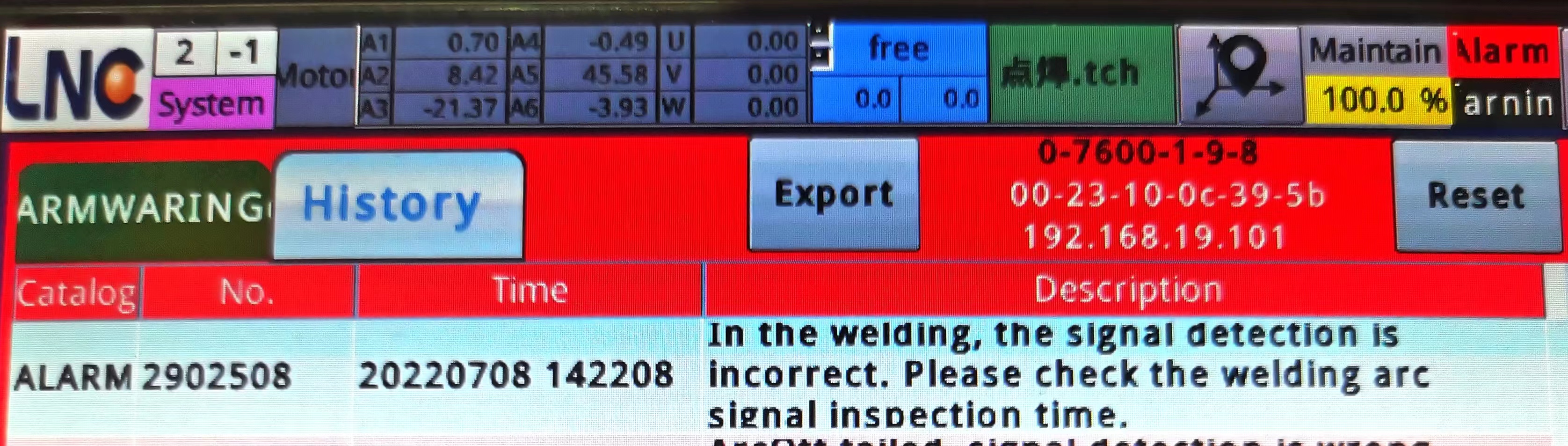
۲. د قوس په پیل کې پاتې راغی، د سیګنال کشف غلط دی
چلند:
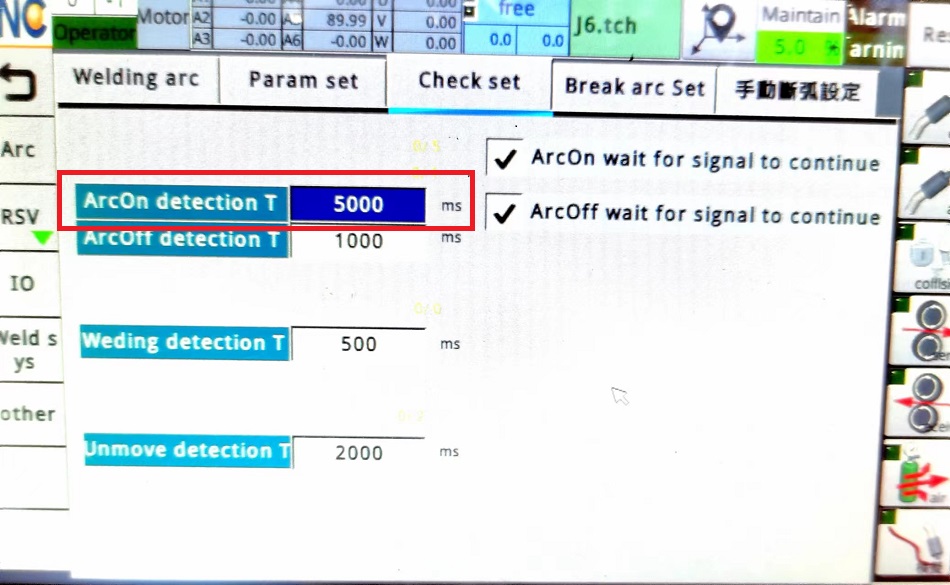
۱) د پیرامیټر پاڼې کې د ویلډینګ د مداخلې وخت ترتیب وګورئ. عموما، دا مناسبه ده چې وخت 5000ms ته وټاکئ.
۲) وګورئ چې ایا د ویلډینګ ماشین سیګنال په بریالیتوب سره سیسټم ته لیږدول شوی
۳) وګورئ چې ایا د کار ټوټه په ځمکه کې ده
۳. د آرک فریډ تار
دلیل:
۱) د جریان او ولتاژ بې اتفاقي
د پروسس کولو طریقه: موږ اړتیا لرو چې د ورک پیس او ویلډینګ ماشین د اصلي ضخامت سره سم مناسب جریان او ولتاژ تنظیم کړو.
۲) د ویلډینګ تار اوږدوالی ډېر اوږد دی
د درملنې طریقه: عموما، د ویلډینګ تار اوږدوالی د ویلډینګ تار د قطر څخه 10 څخه تر 15 ځله وي، او د ویلډینګ تار مناسب اوږدوالی د ویلډینګ تار د قطر سره سم غوره کیږي.

ډېر لږ جریان د نا مساوي ویلډونو لامل کیږي

نورمال جریان او ولتاژ، ښکلی او ټینګ ویلډ

د ویلډینګ مشعل پای به تار سره ولګوي

د ویلډینګ مشعل پای تار د نورمال ویلډینګ وروسته په ښه حالت کې دی
۴. د اتوماتیک قوس اور وژنې پدیده د قوس کولو وروسته پیښیږي
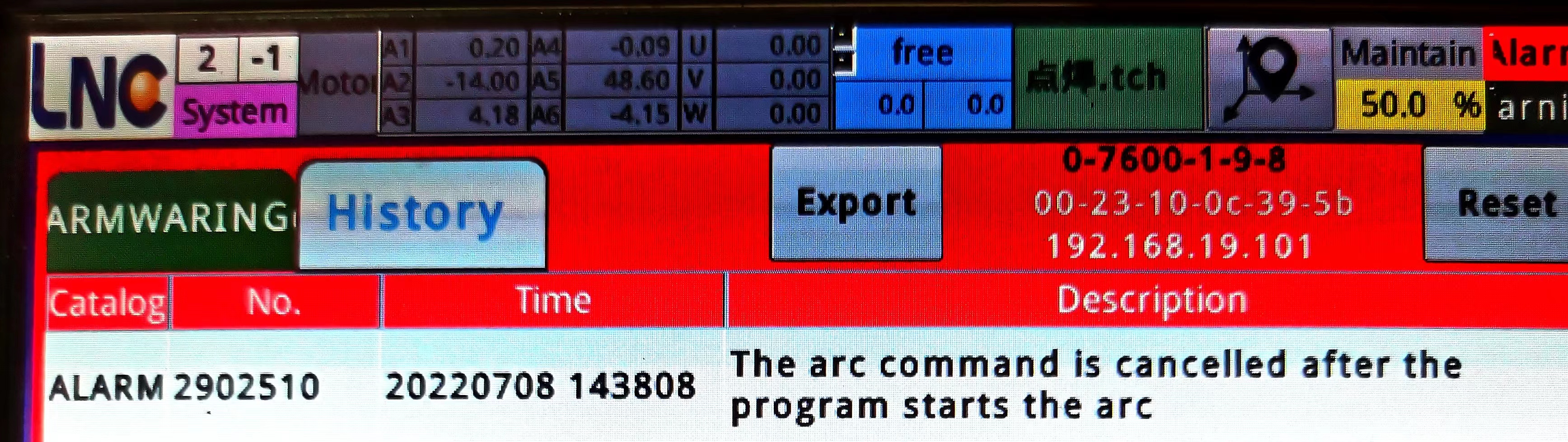
حل: وګورئ چې ایا د پیرامیټر وخت سره ستونزه شتون لري چې د وخت تنظیم حرکت نه کوي، او وګورئ چې ایا د ویلډینګ مشعل حرکت کړی دی.
۲. د ویلډینګ په جریان کې د قوس ماتیدل واقع کیږي
دلیل:
۱. که چیرې د ویلډینګ تار د ورک پیس سره ونه لګیږي، د قوس ماتولو الارم به پیل شي.
د درملنې طریقه: د ویلډینګ تار او ورک پیس موقعیت بیا تنظیم کړئ، ترڅو د ویلډینګ تار د ویلډینګ پروسې په جریان کې په بشپړ ډول د ورک پیس سره اړیکه ونیسي. (مګر دا باید د ورک پیس سره ډیر نږدې نه وي، دا ممکن د ورک پیس له لارې ویلډینګ ته لاره هواره کړي)
۲. د ویلډینګ غیر معقول لاره د ټکر له امله د ټوپک سر په اتوماتيک ډول پورته کیدو لامل کیږي
حل: د ویلډینګ لاره بیا تنظیم کړئ
۳. د ویلډینګ ماشین مثبت او منفي تارونه په کمزوري تماس کې دي
د درملنې طریقه: د مثبت او منفي تارونو د تارونو حالت وګورئ
۳. د ویلډینګ وروسته د آرک پای د ناکامۍ لاملونه
۱. د قوس ناکامي، د سیګنال کشف تېروتنه
دلیل: د ویلډینګ ماشین د روبوټ څخه سیګنال ترلاسه نه کړ، چې له امله یې روبوټ د قوس تړلو کې پاتې راغی.
چلند:
(۱) وګورئ چې ایا د ترتیب پیرامیټرې معقولې دي
(۲) د IO سیګنال وګورئ، او وګورئ چې ایا د پای ټکي I سیګنال غیر معمولي دی. که چیرې د I نقطې سیګنال فعال پاتې شي.
(۳) وګورئ چې ایا په لیکه کې شارټ سرکټ شتون لري او ایا د ځمکې تار په غیر معمولي ډول وصل دی
۲. د آرک سټرایک وروسته د آرک سټاپ هیڅ کمانډ نه دی ټاکل شوی

دلیل: کله چې دا الارم په تدریسي پینډنټ کې پیښ شي، وګورئ چې ایا تاسو د آرک پای کمانډ اضافه کول هیر کړي دي
د پروسس کولو طریقه: په پروګرام کې د آرک پیل کولو قوماندې وروسته د آرک پای قومانده اضافه کړئ
دا مسله په عمده توګه د ویلډینګ پروسې په جریان کې د یونها ویلډینګ روبوټ د آرک پیل کولو، آرک ماتولو او آرک پای پورې اړوند ستونزې معرفي کوي. که چیرې کاروونکي د کارولو پرمهال له داسې ستونزو سره مخ شي، دوی کولی شي حلونو ته مراجعه وکړي. که چیرې دوی حل نشي، مهرباني وکړئ په وخت سره د یونها تخنیکرانو مرسته وغواړئ.
که تاسو غواړئ د یونهوا روبوټ نورې عامې ستونزې او حل لارې وپیژنئ، مهرباني وکړئ د یونهوا روبوټ رسمي حساب ته پام وکړئ.
د یونهوا ویلډینګ روبوټ یو اتوماتیک روبوټ دی چې څو اړخیزه ویلډینګ لکه د ګاز شیلډ ویلډینګ، ارګون آرک ویلډینګ، پلازما پرې کول، او لیزر ویلډینګ سره یوځای کوي. دا لوړ انعطاف، قوي تطابق، د ویلډینګ موثریت او مستحکم ویلډینګ کیفیت لري، او په پراخه کچه په مختلفو برخو کې کارول کیدی شي. لکه د ماشینونو تولید، د موټرو تولید، دقیق الکترونیک او د ډبرو سکرو کان کیندنه او نور ساحې.
د پوسټ وخت: جولای-۱۵-۲۰۲۲



